全國服務咨詢熱線:
15216837090
15216837090

一、前言
《電力拖動自動控制系統》是電氣工程及其自動化專業的主干專業課,課程知識的綜合性強、覆蓋面寬,綜合了《自動控制原理》、《電機拖動》、《電力電子技術》、《檢測技術》等課程的相關知識。該課程又是后續課,其先修課有《計算機控制系統》、《伺服控制系統》等。綜合所學知識、靈活運用所學知識、建立控制系統物理系統的完整概念、理論與實際的緊密結合是該課程的特點。
在該課程的傳統課堂教學中,教師一般采用“滿堂灌”的教學方法講授理論知識,學生處于*被動的狀態,只能機械地記憶原理,比較枯燥、乏味,漸漸地就失去學習興趣,甚至厭學,因而嚴重地影響了教學效果。尤其學生都沒有實際工作經驗,對課程或知識的認識很模糊,甚至不能將所學知識與工程應用聯系起來,這也不符合我們應用型人才培養的目標。
在電力拖動自動控制課程授課過程中,引入Matlab計算機仿真軟件輔助教學,通過計算機仿真模型將課程內容與實際應用結合起來,老師邊講邊演示,學生邊學邊操作,這種方式將使學生能積極的參與到課堂教學中,也能提高他們學習的興趣和積極性。
利用Matlab中的Simulink軟件進行系統仿真是十分簡單和直觀的,Simulink提供了使用系統模型框圖進行組態的仿真平臺,使用Simulink進行仿真和分析可以像在紙上繪圖一樣簡單。應用Simulink搭建電力拖動自動控制系統通常有兩種方法,一種是依據系統的動態結構圖進行,另一種是依據系統的電氣結構圖來組建。它們各有特點,本文將分別給予說明。
二、按系統動態結構圖的仿真
對自動控制系統進行動態分析是為了判斷系統的穩定性以及掌握各項動態性能指標與動態參數之間的關系。以直流調速系統為例,不管是單閉環系統還是雙閉環系統,系統中都包含有可變直流電源、調節器、電動機、反饋裝置等環節。建立各環節的傳遞函數,并依據它們之間的相互關系組合起來就構成了系統的動態結構圖,從而進行動態分析。在傳統的課堂教學中,學生沒有辦法直觀地觀察和發現動態參數對調速性能的影響,因此可以使用Simulink按照系統的動態結構圖來搭建仿真模型。
利用Simulink的Continuous模塊庫中的傳遞函數模塊建立電動機、直流電源等各環節的模型并將它們組合在一起。利用這種方法建模的前提是需要知道各組成環節的傳遞函數,優點是系統模型簡單,建模容易,參數的修改也比較方便。
圖1 按動態結構圖的單閉環調速系統的仿真模型
以轉速負反饋單閉環直流調速系統為例,按系統動態結構圖搭建的模型如圖1所示。電動機空載啟動,到1s時突加滿載,電動機的轉速和電流變化波形如圖2所示。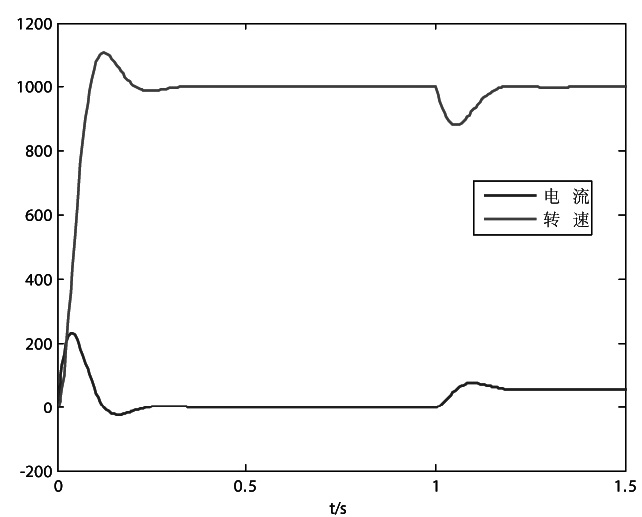
圖2 單閉環調速系統輸出仿真曲線
結合模型以及仿真結果可以看出:(1)電動機空載啟動時的電流很大,這對學生來說就是很直觀的感受。(2)在電機啟動調整的過程中電流出現了反向,這是由于動態結構圖中晶閘管整流器的傳遞函數是線性的,而實際的晶閘管整流器不能通過反向電流,所以這也是采用動態結構圖建模和采用電氣結構圖建模的不同,后者能更好地反映系統的工作情況。(3)在突加、突減負載時,可以給予學生實時、直觀的展示,加深學生對動態調節過程的理解。
教師在授課前,可以事先將模型搭建出來,在課堂上運行得到輸出響應曲線。在教學時可以引導學生分析為什么啟動時的電流很大,為什么在動態過程中出現了電流反向,為什么在滿載時電動機也能穩定運行于給定轉速。讓學生帶著問題再去思考所講過的理論知識,學生的接收能力更強,學習的積極性也會更高。
三、按系統電氣結構圖的仿真
Simulink中的電力系統工具箱SimPowerSystems里面包含有電源、變壓器、電機、電阻、電容以及各種電力電子元件,因此可以依照系統的電氣結構圖,從元件庫中選擇需要的器件進行連接即可實現系統的搭建。這里不需要事先推導各環節的傳遞函數,建模過程更接近于真實系統的搭建過程。以雙閉環直流調速系統為例,按系統電氣結構圖搭建的模型如圖3所示。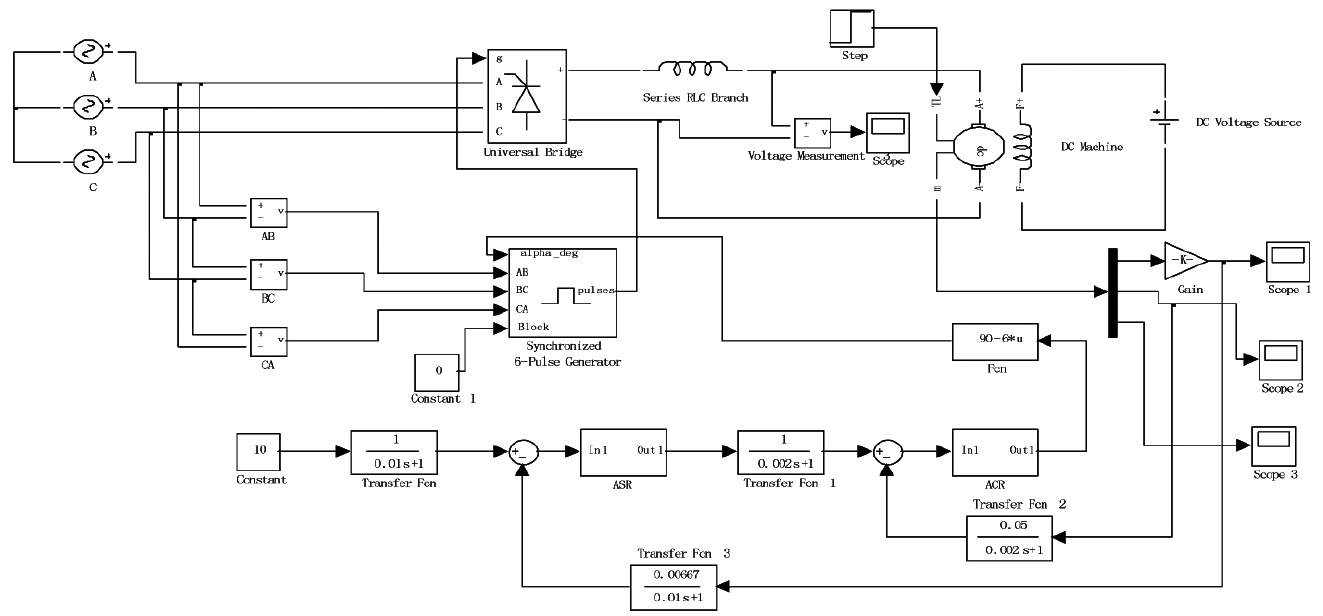
圖3 按電氣結構圖的雙閉環調速系統的仿真模型
按電氣結構圖搭建的系統中電源與電動機采用SimPowerSystems里面的元件來實現,系統的主電路由交流電源、晶閘管整流器、觸發器、移相控制環節和電動機連接而成。控制回路的主體是轉速調節器和電流調節器以及反饋濾波環節,與前述按動態結構圖的單閉環系統仿真類似。與按動態結構圖仿真相比,該建模方法可以使學生獲得更直觀、更直接的效果。電動機空載啟動,到0.6s時突加滿載,電動機的轉速和電流變化波形如圖4所示。
圖4 雙閉環調速系統輸出仿真曲線
結合模型以及仿真結果可以看出:(1)電動機啟動時電流很快上升到大值,這是啟動的第1階段;隨后維持大電流,電動機以恒定加速度上升到給定轉速,這是第2階段;之后轉速和電流相互調節,進入啟動的第3階段,直到系統達到穩定。從圖上可以明顯地看出這3個階段,在授課時結合這個輸出波形講解會大大提高學生對雙閉環直流調速系統起動過程的理解與掌握。(2)在0.4s時起動過程結束,電樞電流下降到0,轉速上升到高且已經超調,電流給定變負,但是晶閘管整流裝置不能產生反向電流,這時電樞電流為0,又由于是空載起動,所以電動機保持在高轉速狀態,這是與帶載起動時大的不同。(3)在突加負載時,轉速和電流都會出現動態變化過程,如果調節器參數選擇得不夠好,會有一段振蕩過程。
按系統動態結構圖仿真和按系統電氣結構圖仿真都可以用于電力拖動自動控制系統的教學中,考慮到學生初步接觸仿真軟件以及學時限制的問題,在理論教學中用動態結構圖搭建模型更簡單實用。電氣結構圖仿真可以在做課程設計時使用,按照工程設計法求出電流調節器和轉速調節器的參數,學生利用電力系統模塊庫中提供的元件搭建系統,完成系統的仿真。
四、結語
在電力拖動自動控制系統的課堂教學中引入Matlab仿真,加深了學生對系統的認識,使學生能將所學的知識與實際應用很好地聯系起來,對于學生掌握、分析和設計自動控制系統具有重要的作用。
電話
微信掃一掃

 當前位置:
當前位置: